About Me

I am Enzo CHERIF, currently working as an ATC Software Engineer on a VIE assignment at Alstom in Pittsburgh, Pennsylvania 🇺🇸, developing software and automation tools for safety-critical railway signaling systems.
I hold a dual engineering degree from INP de Toulon and the University of Toulon, specializing in robotics, mechatronics, and embedded systems.
I work on a variety of projects combining Python, artificial intelligence, data processing, ADAS, MATLAB/Simulink simulation, mobile robotics, and many more — feel free to explore them throughout my site.
Versatile, meticulous, and passionate, I strive to blend innovation with tangible impact in every technical challenge.

Current Position
VIE
ATC Software Engineer
Alstom — Pittsburgh, Pennsylvania 🇺🇸
Development of software & automation tools for safety-critical railway signaling systems — data analysis, diagnostics, and GUI engineering.
CFMS RIP Tool
C# / C++- Analysis & processing of large-scale train log files (FMS) for simulation & diagnostics
- C# features for alarms, headway & wayside data (RATO/CITC environments)
- Integration with existing C++ codebase (Solution Core)
- Structured TXT/Excel outputs + graphical interfaces for engineering validation
Configuration Tool
Python / PyQt- GUI to generate & validate railway configuration files (.cfg)
- Automation of command file generation (routes, stations, control parameters)
- Structural & safety rule enforcement (speed limits, routing, switch behavior)
🤖 Lightweight AI for log diagnostics
🧪 Testing & anomaly detection automation
🤝 Agile cross-functional team
🔒 Deliverables are confidential and cannot be publicly displayed.
Final Year Internship
Internship Report
Automation Tools Developer
Renault Group — Ampere Software Technology 🇫🇷
1–2 wks → 30 sec
Processing time reduced with ~1% error rate — Python automation replacing manual Excel workflows

Excel & Workflow Automation
Python Pandas NumPy VBA Tkinter- Automated complex Excel files — slashing processing time from weeks to seconds
- Built engineer-facing Tkinter GUIs with auto-generation of Word & PowerPoint deliverables
- Integrated email dispatch directly into the tool pipeline
SDV — Power Distribution & Activation
CANoe DDT2000 XML- Developed XML diagnostic screens for fault analysis via DDT2000
- Performed functional tests on test benches and the Integration & Test Platform (PIE)
🔒 Deliverables are confidential and cannot be publicly displayed.
Projects
-
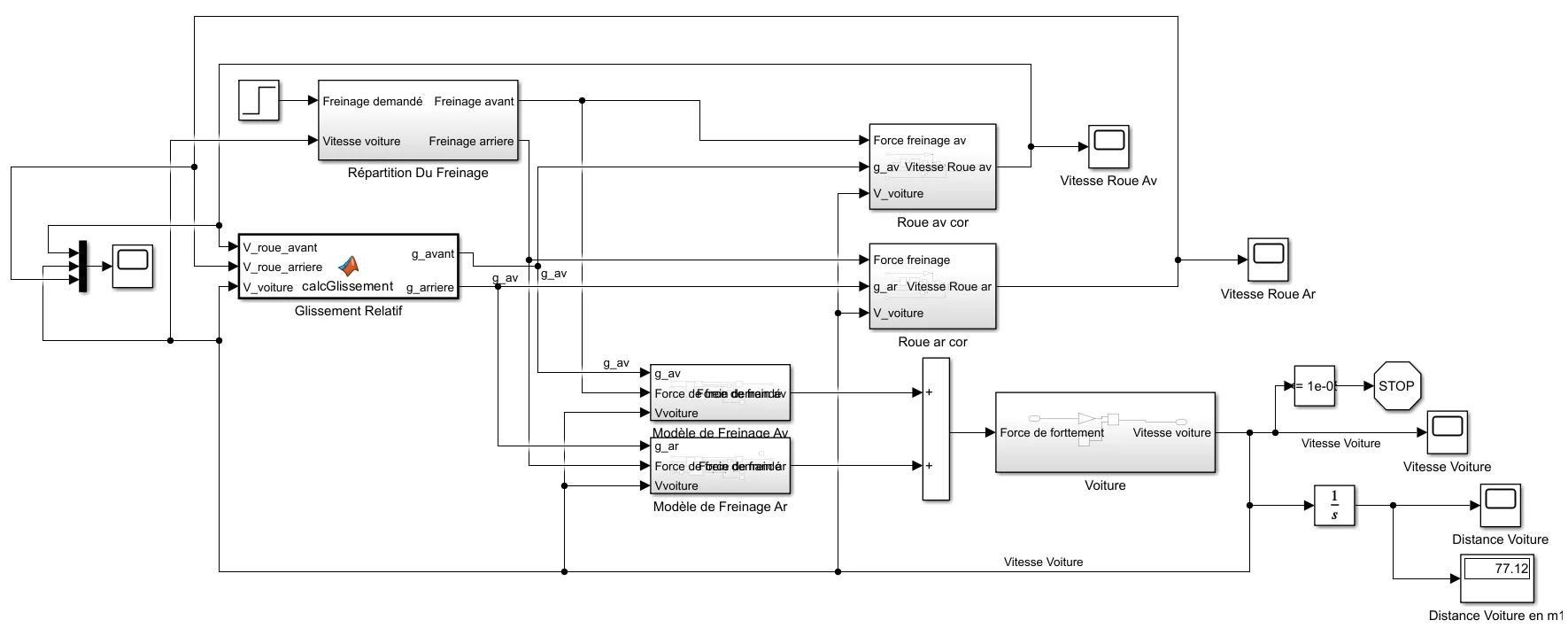
Vehicle Dynamics: ABS & EBD
Modeling and simulation of an advanced braking system in Matlab/Simulink, integrating ABS and EBD to optimize stability and stopping distance.
📄 Full Report -
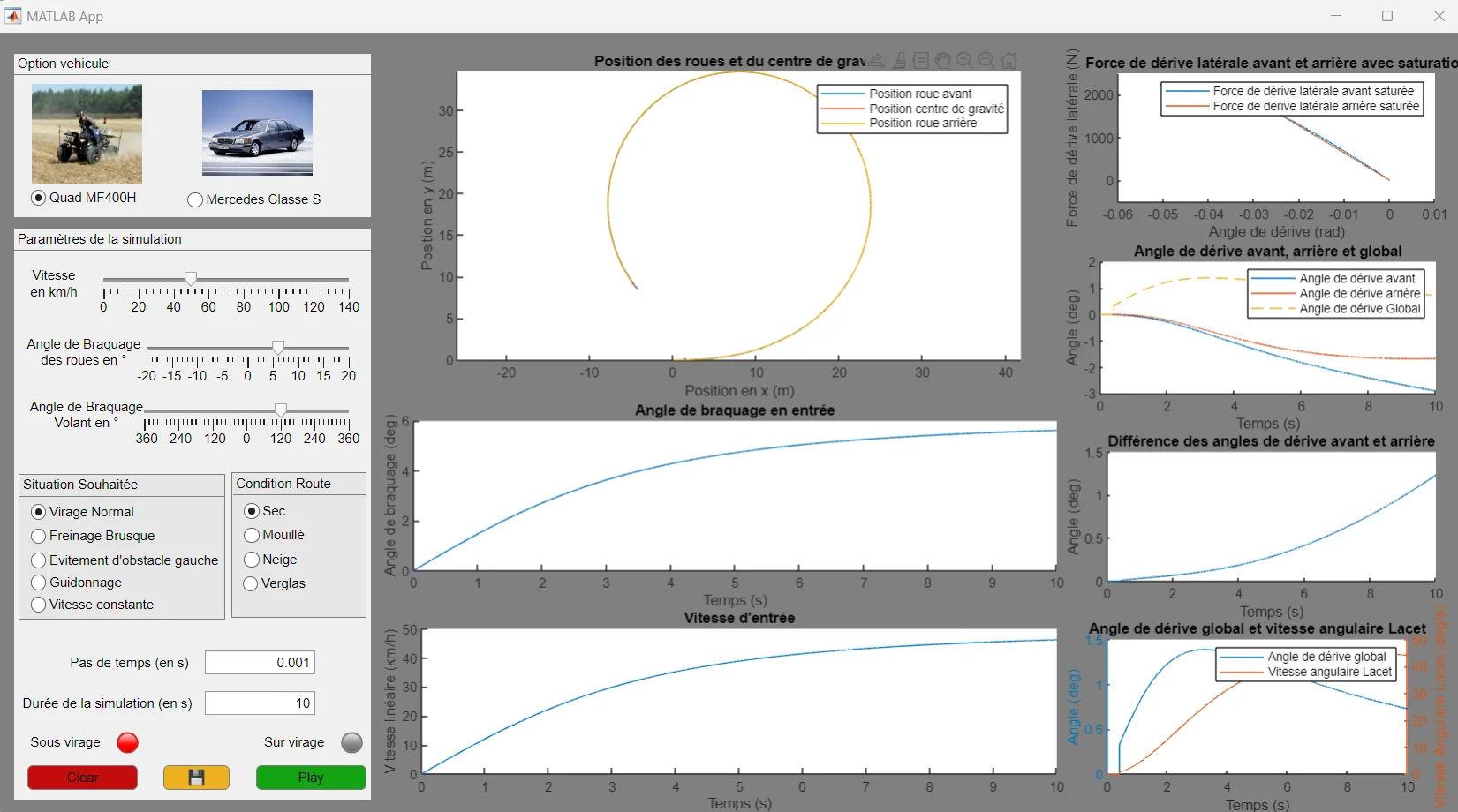
MATLAB Dynamic Simulator
Interactive interface to study the stability of an MF400H quad and a Mercedes S-Class: kinematic & dynamic modeling, real-time safety indicators.
📄 Full Report -
.webp)
Image Processing: Segmentation & Counting
Python/OpenCV pipeline to identify and count objects from grayscale images: adaptive thresholding, morphology, labeling.
📄 Full Report -
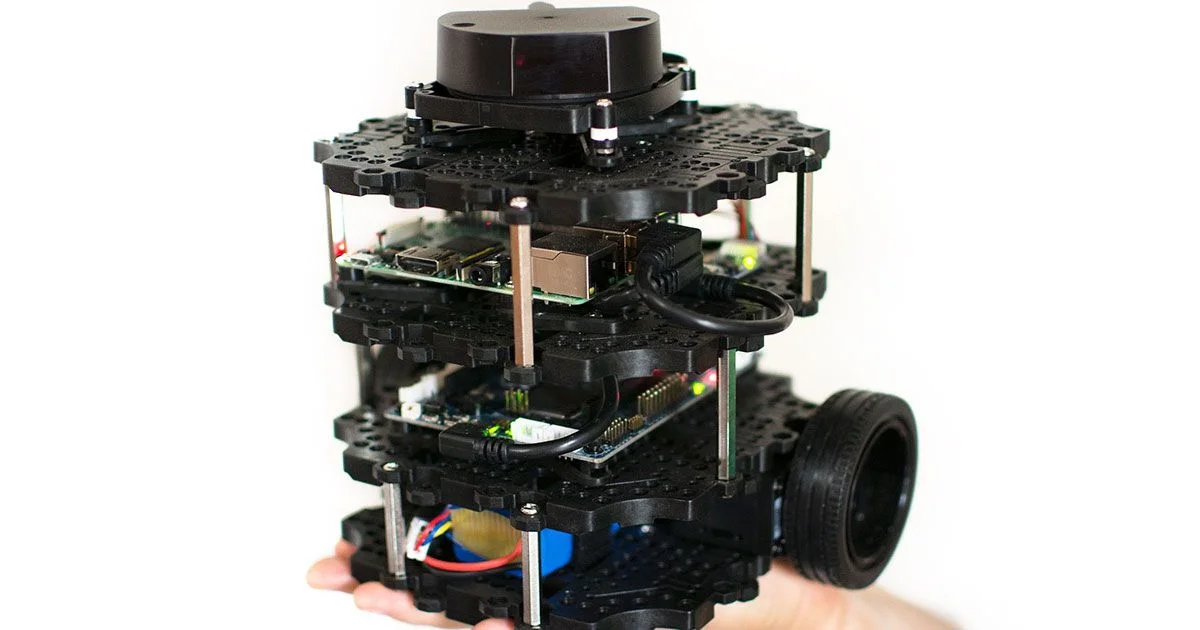
ROS Programming: Autonomous TurtleBot
Real-time navigation, mapping, and obstacle avoidance under ROS 1: handling topics, C++/Python nodes, integrating LiDAR and RGB-D camera sensors.
📄 Full Report -
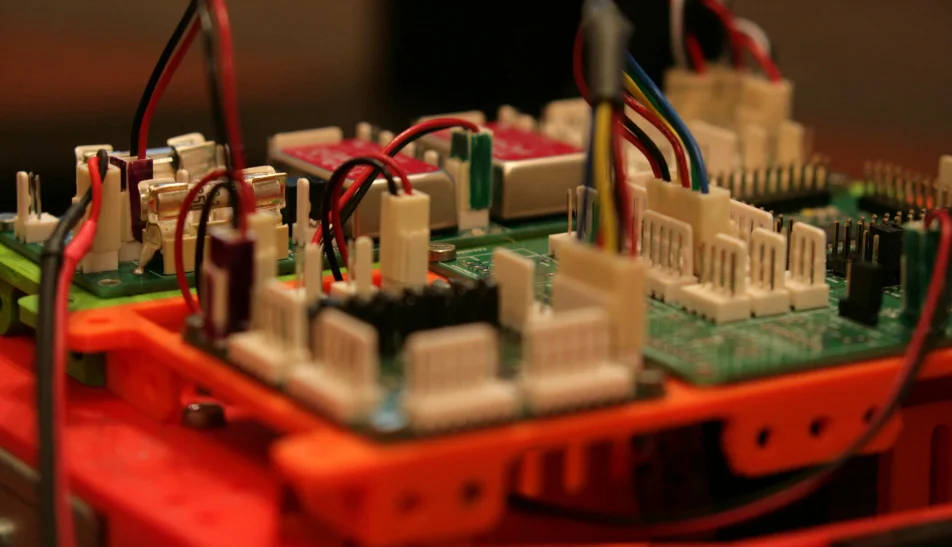
Embedded Systems: Mobile Robot Control
C# software suite (UART) to monitor a mobile robot: real-time commands, telemetry, UI ergonomics & microcontroller testing.
📄 Full Report -
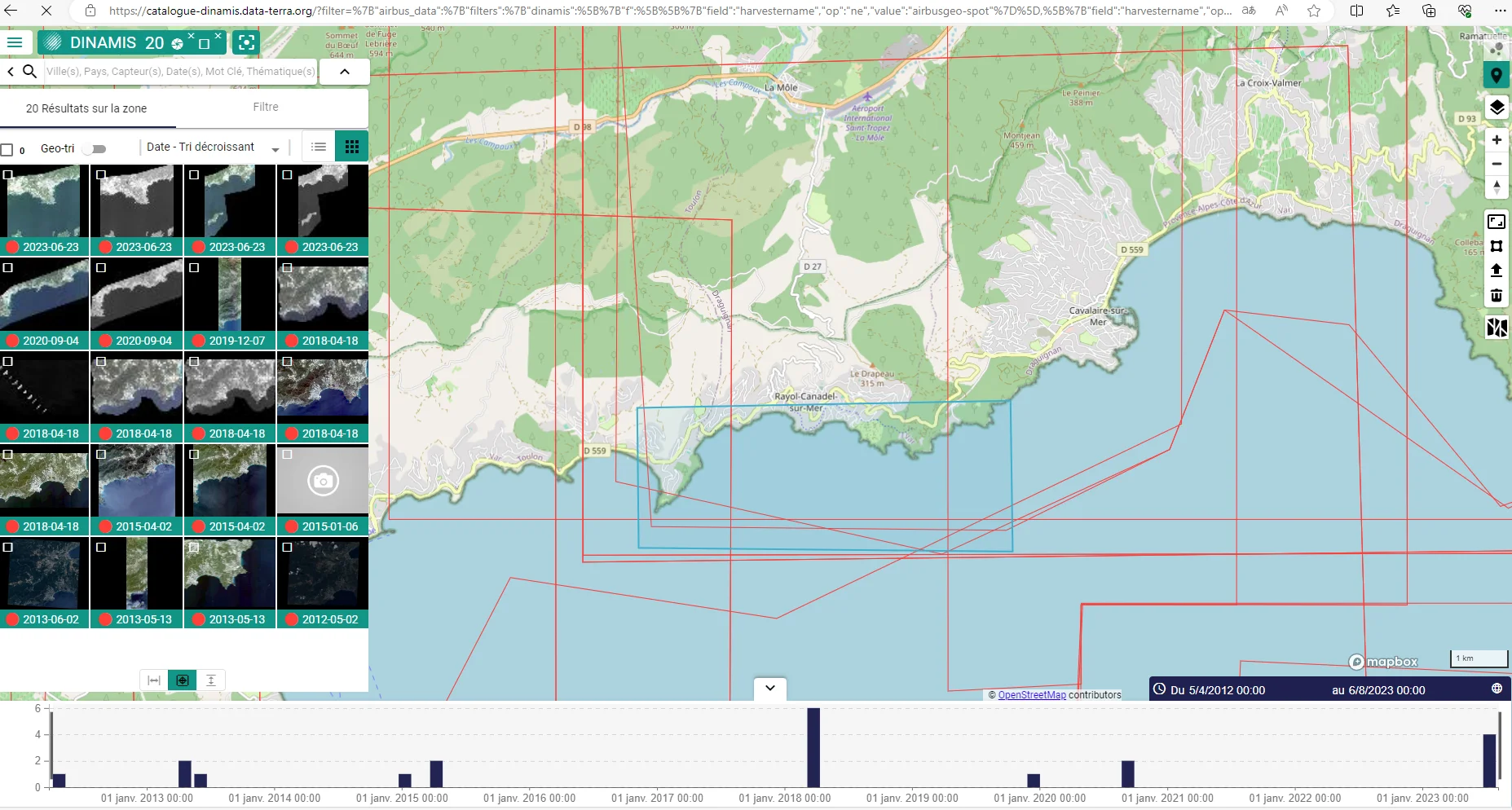
Marine Mapping: Posidonia at Domaine du Rayol
Fusion of satellite imagery and bathymetric data to map seagrass beds: supervised classification, QGIS processing, ecological monitoring recommendations.
📄 Full Report

Internship in Thailand — TFII, Bangkok
During my internship at the Thai-French Innovation Institute (TFII),
I worked on the energy management of solar electric vehicles. My goal
was to develop a control system optimizing the use and storage of solar energy while
ensuring vehicle stability.
The algorithms were designed and tested on the Texas Instruments TMS320F28335
board, which allowed me to deepen my power electronics skills in an exciting
multicultural environment.
- LAB 1 : Getting started with TI 28335
- LAB 2 : Installation & control setup
- LAB 3 : PWM control on TI F28335
- LAB 4 : Duty-cycle regulation
- LAB 5 : Voltage & current measurement
- LAB 6 : Precision of voltage measurements
- LAB 7 : Exploring boost & buck converters
- LAB 8 : Practical boost converter tests
- LAB 9 : Practical buck converter tests
- LAB 10 : Boost converter optimisation
- LAB 11 : Buck converter optimisation
Certifications
Machine Learning with Python (V2) — IBM
🎓 View Certification- 📅 Issued: June 23, 2025
- 📚 Covered: Regression, Classification, Clustering, Dimensionality Reduction
- 🧠 Algorithms: KNN, Decision Trees, SVM, DBSCAN, PCA, t-SNE, UMAP
- 🐍 Tools: Python, Scikit-learn, NumPy
- 🔗 View GitHub Repository
Compétences
Tools
MATLAB Simulink
Advanced modeling and simulation
MATLAB App Designer
Creating interactive applications for modeling
LabVIEW
Design of measurement and automation applications
ROS (Robot Operating System)
Robot control and coordination
Linux
Administration and development on Unix systems
Git
Version control for collaborative projects
LaTeX
Administration and development on Unix systems

SolidWorks
3D modeling and simulation for product design
CATIA
Design and modeling of mechanical systems
Windows
Operating systems for everyday use
Excel
Data analysis and spreadsheet automation
Microsoft Office Suite
Document management and professional presentations
Domains
Robotics
Autonomous systems & control
Mechatronics
Mechanical & electronic integration
Embedded Systems
Hardware & software design
Artificial Intelligence
& Machine Learning
Predictive models & optimization
Computer Vision
Image processing & analysis
Internet of Things (IoT)
Connected devices & MQTT protocol
Data: Excel & Python
Cleaning, analysis & automation
Micro-/Nano-Electronics
Components & manufacturing processes
Drones & Autonomous Vehicles
Navigation, control & safety
References
My journey
Bac S – Option SI
Lycée Parc des Loges
2019Classe Préparatoire PTSI / PT
Lycée Parc de Vilgénis
2019 – 2022
French Engineering Degree in Mechatronics & Robotics
SeaTech – INP Toulon
2022 – 2025Master’s degree in Robotics & AI
Université de Toulon
2024 – 2025Contact
- Email : enzocherife@gmail.com
- LinkedIn : linkedin.com/in/enzocherif
- Download my resume